1. 精度mAP
1.1 混淆矩阵
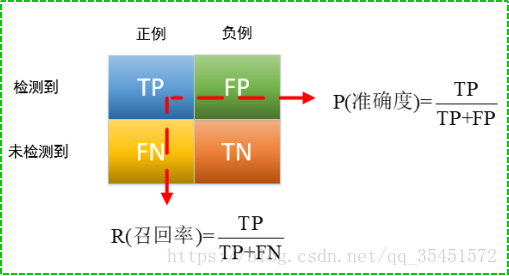
我们首先好好解读一下混淆矩阵里的一些名词和其意思。根据混淆矩阵我们可以得到TP,FN,FP,TN四个值,显然TP+FP+TN+FN=样本总数。这四个值中都带两个字母,单纯记忆这四种情况很难记得牢,我们可以这样理解:第一个字母表示本次预测的正确性,T就是正确,F就是错误;第二个字母则表示由分类器预测的类别,P代表预测为正例,N代表预测为反例。比如TP我们就可以理解为分类器预测为正例(P),而且这次预测是对的(T),FN可以理解为分类器的预测是反例(N),而且这次预测是错误的(F),正确结果是正例,即一个正样本被错误预测为负样本。
| 符号 | 含义 |
|---|---|
| TP(true positive) | 分类器预测为正例,预测是正确的,实际是正例 |
| FP(false positive) | 分类器预测为正例,预测是错误的,实际为负例 |
| TN(true negative) | 分类器预测为负例,预测是正确的,实际为负例 |
| FN(false negative) | 分类器预测为负例,预测是错误的,实际为正例 |
1.2 Precision、Recall、PRC、F1-score
Precision指标在中文里可以称为查准率或者是精确率,Recall指标在中卫里常被称为查全率或者是召回率,查准率 P和查全率 R分别定义为:

查准率P和查全率R的具体含义如下:
- 查准率(Precision)是指在所有系统判定的“真”的样本中,确实是真的的占比
- 查全率(Recall)是指在所有确实为真的样本中,被判为的“真”的占比
这里想强调一点,precision和accuracy(正确率)不一样的,accuracy针对所有样本,precision针对部分样本,即正确的预测/总的正反例:

2. 速度 fps
目标检测算法的另外一个重要性能指标是速度,只有速度快,才能实现实时检测,这对一些应用场景极其重要。评估速度的常用指标是每秒帧率(Frame Per Second,FPS),即每秒内可以处理的图片数量。
3. 准确性 IOU
IOU(Intersection over Union),中文翻译为交并比。
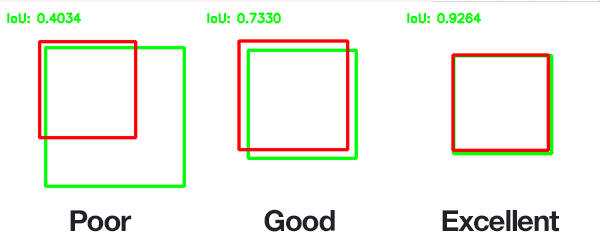
这里是一个实际例子:下图绿色框是真实感兴趣区域,红色框是预测区域,这种情况下交集确实是最大的,但是红色框并不能准确预测物体位置。因为预测区域总是试图覆盖目标物体而不是正好预测物体位置。这时如果我们能除以一个并集的大小,就可以规避这种问题。这就是IOU要解决的问题了。

下图表示了IOU的具体意义,即:预测框与标注框的交集与并集之比,数值越大表示该检测器的性能越好。

使用IOU评价指标后,上面提到的问题一下子解决了:我们控制并集不要让并集太大,对准确预测是有益的,这就有效抑制了“一味地追求交集最大”的情况的发生。下图的2,3小图就是目标检测效果比较好的情况。